> W:=proc(f,j,k);#
procedure qui resout x"+k^2*x=f ,x(0)=0, x'(0)=0
> l:=array(0..j); m:=array(1..j);S:={seq(i,
i=1..j)} minus {k}; ;
> for q from 1 to j do;
> l[q]:=coeff(f,cos(q*t));
m[q]:=coeff(f,sin(q*t));od; l[0]:=f-add(l[r]*cos(r*t)+m[r]*sin(r*t), r=1..j);
> add(1/(k^2-r^2)*l[r]*(cos(r*t)-cos(k*t))+1/(k^2-r^2)*m[r]*(sin(r*t)-sin(k*t)),
r=S)+1/k^2*l[0]*(1-cos(k*t));
> end proc:
> T:=proc(k,n);
> u:=array(0..n); x:=array(0..n);u[0]:=cos(k*t);
x[0]:=k^2;
> v:=sum(u[j]*y^j, j=0..n);
z:=sum(x[j]*y^j, j=0..n)+y*cos(2*t);
> P:=collect(expand(v*z),trig):
> for j from 1 to n do;
> F:=combine(coeff(P,y,j)-k^2*u[j]):
> u[j]:=W(-F,2*j*k+2,k);
> C:={coeff(F,cos(k*t)),
coeff(F, sin(k*t))};
> V:=solve(C,x[j]);
> subs(V, x[j]);x[j]:=%;
> od;[eval(z-y*cos(2*t)),eval(v)];
> end proc:
> S:=proc(k,n):
> u:=array(0..n); x:=array(0..n);u[0]:=sin(k*t);
x[0]:=k^2;
> v:=sum(u[j]*y^j, j=0..n);
z:=sum(x[j]*y^j, j=0..n)+y*cos(2*t);
> P:=collect(expand(v*z),trig):
> for j from 1 to n do;
> F:=combine(coeff(P,y,j)-k^2*u[j]);
> u[j]:=W(-F,2*j*k+2,k);
> C:={coeff(F,cos(k*t)),
coeff(F, sin(k*t))};
> V:=solve(C,x[j]);
> subs(V, x[j]);x[j]:=%;
>
od;[eval(z-y*cos(2*t)),eval(v)];
> end proc:
> with(plots):
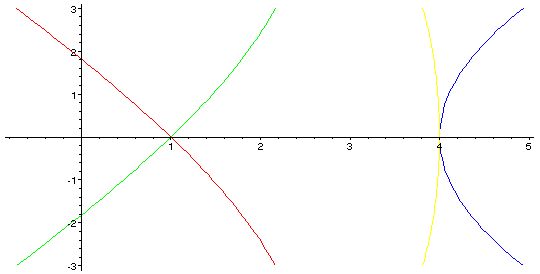
> p:=plot([S(1,3)[1],T(1,3)[1],S(2,3)[1],T(2,3)[1]],y=-3..3):
> with(plottools): rotate(p,-Pi/2);
Voici le
résultat
{kind=link}